|
Dört yıllık mühendislik eğitimim sonucunda, robotlara olan ilgimden dolayı,
bitirme çalışması olarak özel olarak geliştirdiğim mobil aracın kontrolü
üzerinde çalıştım.Asıl amacım bu projenin insanların girmesinin sakıncalı olduğu
yerlere girebilen çok amaçlı bir keşif aracı olması olmasına çalışmaktı.
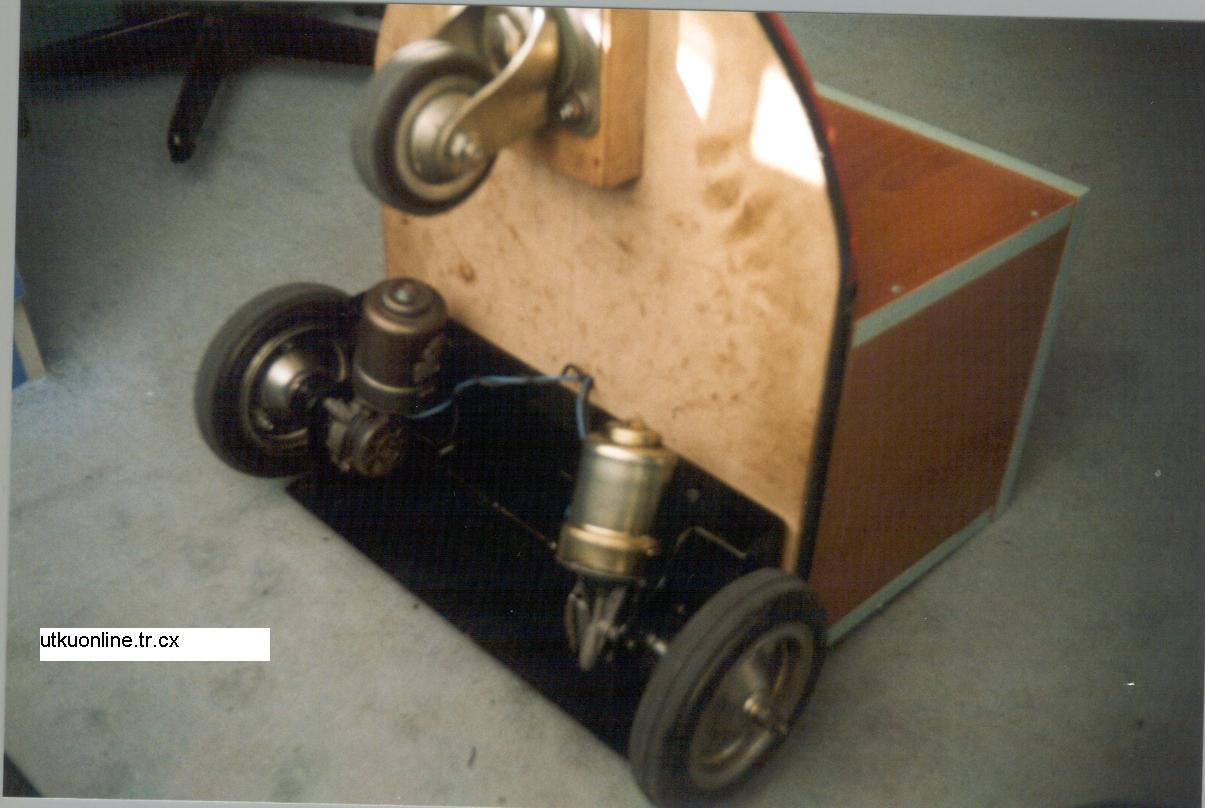
Otomatik Taşıyıcı MDF platform üzerine oturtulmuştur. Manevra ve hareketini tank
sistemini düşünülerek hazırladım.Bu yüzden 3 tekerlekli sistemi
kullandım.Böylece araç kendi ekseninde 360 derece dönebilmektedir ve 60 kg a
kadar olan yükleri taşıyabilmektedir.
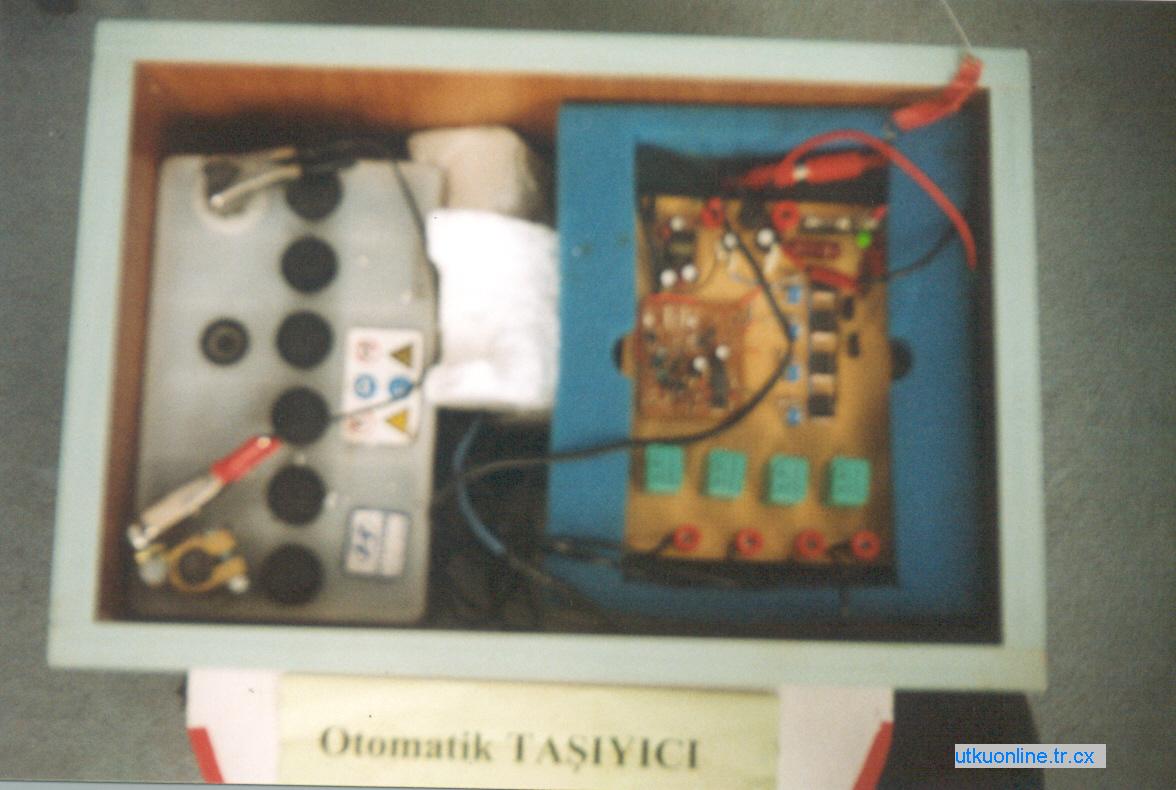
Otomatik Taşıyıcı´nın iki adet Tofaş silecek motoru, besleme kaynağı olarak 2
adet 12V 50Ah lik ve röle ,yükselteç uzaktan kumanda alıcısından oluşan kontrol
kartından oluşmaktadır.
Bu
bitirme çalışması iki kısımdan oluşmaktadır:
I.
Mobil aracın uzaktan kumanda ile kontrolü
II.
Mobil aracın mikrodenetleyici ile otomatik kontrolü
Aracın uzaktan kumanda ile kontrolü kısmı, mobil araca 27Mhz 4 kanallı R/C
uzaktan kumada kontrol devresinin uyarlanmasını kapsamaktadır.Bu kısımda elle
kumanda edilen R/C verici sayesinde aracın hareket etmesi ve yönlendirilmesi
sağlanmaktadır.
Aracın otomatik kontrol kısmı ise mikrodenetleyici (PIC16F877) ile ultrasonik
sensörlerden alınan sinyallere göre aracın çevresinde bulunan cisimlere
çarpmadan istenilen program doğrultusunda otomatik hareket etmesi
sağlanmasıdır.
Daha ayrıntılı bilgi için aşağıdaki linke tıklayarak pdf formatındaki bitirme
projemi inceleyebilirsiniz.
Bitirme Projem (693Kb)

Not:Bitirme projemin görüntülenebilmesi için Adobe
Acrobat Reader 5.0 programının yüklü olması gerekir.
|