PIC16CXX ailesinin yüksek performansı,
RISC mikroişlemcilerinde sıkça bulunan bir dizi yapısal niteliğe
atfedilebilir. Başlangıç olarak, PIC16CXX bir Harvard Yapısı
kullanmaktadır. Bu yapı, ayrı hafızalardan kabul edilen program ve
verilere sahiptir. Bu yüzden gereç bir program hafıza taşıyıcısı
ve bir veri hafıza taşıyıcısına sahiptir. Bu, program ve verilerin
aynı hafızadan edinildiği (aynı taşıyıcı üzerinden erişimler)
geleneksel von Neumann yapısı üzerinde bant genişliğini
geliştirmektedir.
Program ve veri hafızasını ayırmak
dahası 8 bit genişliğindeki veri dünyasından farklı olarak
boyutlandırılması için talimatlara izin vermektedir. PIC16CXX
opkodları, tek kelime talimatlarını mümkün kılan 14 bit
genişliğindedir. Tam 14 bit genişliğinde program hafıza taşıyıcısı
tek bir döngü dahilinde bir 14 bitlik talimat sağlamaktadır. İki
kademeli bir boru hattı talimatların alınması ve
gerçekleştirilmesini kısmen kaplamaktadır (Örnek 3 – 1). Sonuç
olarak, program
dalları için hariç tüm talimatlar tek bir döngüde
gerçekleştirilmektedir (400 ns @ 10 MHz).
PIC16C84, 1 K x 14 program hafızasına hitap etmektedir. Tüm program
hafızası içeridedir.
PIC16CXX gereçleri, kayıt dosyaları veya veri hafızasına doğrudan veya
dolaylı olarak hitap etmektedir. Program sayacı dahil tüm özel
işlev kayıtları veri hafızası dahilinde haritalandırılmıştır. Bir
ortogonal (simetrik) talimat, herhangi hitap etme modunu kullanan
herhangi bir kayıt hakkında herhangi bir işlemi gerçekleştirmesini
mümkün kılacak şekilde ayarlamaktadır. Bu simetrik yapı ve “özel
optimal durumlar”ın eksikliği, PIC16CXX ile programlamayı basit
bir şekilde etkin hale getirmektedir. Ek olarak, öğrenim eğrisi
belirgin bir şekilde azaltılmıştır.
PIC16C84, 36 x 8 SRAM ve 64 x 8 EEPROM veri hafızasına sahiptir.
PIC16C XX gereçleri, bir 8 bitlik ALU ve çalışan bir kaydedici
içermektedir. ALU genel amaçlı bir aritmetik birimdir. Çalışan bir
kaydedici ve herhangi bir kayıt dosyasındaki veriler arasındaki
aritmetik ve Boolean işlevlerini gerçekleştirmektedir.
ALU, 8 bit genişliğinde ve ekleme, çıkarma değişim ve mantıksal işlem
yeteneğidir. Aksi belirtilmediği sürece, aritmetik işlemler doğal
olarak ikinin bileşenleridir. İki işlenen talimatları dahilinde,
tipik olarak bir işlenen çalışan kaydedicisidir (W kaydedicisi),
ve diğer işlenen bir dosya kaydedicisi veya bir anlık sabitidir.
Tek işlenen talimatlarında, işlenen ya W kaydedicisi veya bir
dosya kaydedicisidir.
W kaydedicisi, ALU işlemleri için kullanılan 8 bitlik bir çalışan
kaydedicisidir. Yönlendirilmiş bir kayıt değildir.
Gerçekleştirilen talimata bağlı olarak ALU, STATUS (Statü) kaydında
Taşıma (C), Basamak Taşıma (DC) ve Zero (Sıfır) (Z) bitlerinin
değerlerini etkileyebilir. C ve DC bitleri, çıkarımda sırasıyla
alıcı ve basamak alıcı dış biti olarak çalışmaktadır. Örnekler
için SUBLW ve SUBWF talimatlarına bakınız.
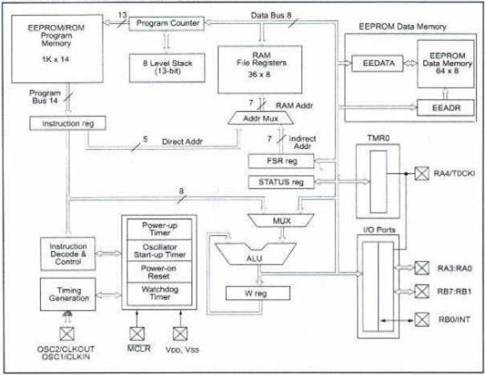
PIC16C84 için basitleştirilmiş bir blok diyagramı aşağıda
gösterilmiştir.
(OSC1’den) Saat girdisi, Q1, Q2, Q3 ve Q4
olarak adlandırılan dört kısmen kaplamayan dördülleme saatlerini
oluşturmak amacıyla içten dörde bölünmüştür. Dahili olarak,
program sayacı (PC) her bir Q1’i artırmakta olup talimat program
hafızasından
alınıp Q4 dahilinde talimat kaydı içine kilitlemektedir. Q1’den
Q4’e doğru takip ederken talimat çözülüp gerçekleştirilmektedir.
Saatler ve talimat gerçekleştirme akışı Şekil 3 – 2 dahilinde
gösterilmiştir.
Bir “Talimat Döngüsü” dört Q döngüsünden (Q1, Q2, Q3 ve Q4)
oluşmaktadır. Talimat alımı ve gerçekleştirilmesi, çözülüp
gerçekleştirme diğer bir talimat döngüsünü oluştururken, bir
talimat döngüsünü oluşturmaktadır. Yine de, boru hattı dolayısı
ile, her bir talimat etkin bir şekilde tek döngüde
gerçekleştirmektedir. Eğer bir talimat program sayacının
değişmesine neden olursa, (ÖR: GOTO) bu durumda talimatı
tamamlamak için iki döngü gereklidir (Örnek 3 – 1).
Bir alım döngüsü, Q1 dahilinde artan Program Sayacı (PC) ile
başlamaktadır.
Gerçekleştirme döngüsünde, alınan talimat, Q1 döngüsündeki “Talimat
Kaydı” içine kapatılmaktadır. Bu talimat daha sonra Q2, Q3 ve Q4
döngüleri esnasında çözülür ve gerçekleştirilir. Veri hafızası Q2
esnasında okunmakta olup (işlenen okuması) ve Q4 esnasında yazılır
(amaç yazılımı).
3.0 YAPISAL GÖRÜNÜM
PIC16CXX ailesinin yüksek performansı, RISC
mikroişlemcilerinde sıkça bulunan bir dizi yapısal niteliğe
atfedilebilir. Başlangıç olarak, PIC16CXX bir Harvard Yapısı
kullanmaktadır. Bu yapı, ayrı hafızalardan kabul edilen program ve
verilere sahiptir. Bu yüzden gereç bir program hafıza taşıyıcısı
ve bir veri hafıza taşıyıcısına sahiptir. Bu, program ve verilerin
aynı hafızadan edinildiği (aynı taşıyıcı üzerinden erişimler)
geleneksel von Neumann yapısı üzerinde bant genişliğini
geliştirmektedir. Program ve veri hafızasını ayırmak dahası 8 bit
genişliğindeki veri dünyasından farklı olarak boyutlandırılması
için talimatlara izin vermektedir. PIC16CXX opkodları, tek kelime
talimatlarını mümkün kılan 14 bit genişliğindedir. Tam 14 bit
genişliğinde program hafıza taşıyıcısı tek bir döngü dahilinde bir
14 bitlik talimat sağlamaktadır. İki kademeli bir boru hattı
talimatların alınması ve gerçekleştirilmesini kısmen kaplamaktadır
(Örnek 3 – 1). Sonuç olarak, program
dalları için hariç tüm talimatlar tek bir döngüde
gerçekleştirilmektedir (400 ns @ 10 MHz).
PIC16C84, 1 K x 14 program hafızasına hitap etmektedir. Tüm program
hafızası içeridedir.
PIC16CXX gereçleri, kayıt dosyaları veya veri hafızasına doğrudan veya
dolaylı olarak hitap etmektedir. Program sayacı dahil tüm özel
işlev kayıtları veri hafızası dahilinde haritalandırılmıştır. Bir
ortogonal (simetrik) talimat, herhangi hitap etme modunu kullanan
herhangi bir kayıt hakkında herhangi bir işlemi gerçekleştirmesini
mümkün kılacak şekilde ayarlamaktadır. Bu simetrik yapı ve “özel
optimal durumlar”ın eksikliği, PIC16CXX ile programlamayı basit
bir şekilde etkin hale getirmektedir. Ek olarak, öğrenim eğrisi
belirgin bir şekilde azaltılmıştır.
PIC16C84, 36 x 8 SRAM ve 64 x 8 EEPROM veri hafızasına sahiptir.
PIC16C XX gereçleri, bir 8 bitlik ALU ve çalışan bir kaydedici
içermektedir. ALU genel amaçlı bir aritmetik birimdir. Çalışan bir
kaydedici ve herhangi bir kayıt dosyasındaki veriler arasındaki
aritmetik ve Boolean işlevlerini gerçekleştirmektedir.
ALU, 8 bit genişliğinde ve ekleme, çıkarma değişim ve mantıksal işlem
yeteneğidir. Aksi belirtilmediği sürece, aritmetik işlemler doğal
olarak ikinin bileşenleridir. İki işlenen talimatları dahilinde,
tipik olarak bir işlenen çalışan kaydedicisidir (W kaydedicisi),
ve diğer işlenen bir dosya kaydedicisi veya bir anlık sabitidir.
Tek işlenen talimatlarında, işlenen ya W kaydedicisi veya bir
dosya kaydedicisidir.
W kaydedicisi, ALU işlemleri için kullanılan 8 bitlik bir çalışan
kaydedicisidir. Yönlendirilmiş bir kayıt değildir.
Gerçekleştirilen talimata bağlı olarak ALU, STATUS (Statü) kaydında
Taşıma (C), Basamak Taşıma (DC) ve Zero (Sıfır) (Z) bitlerinin
değerlerini etkileyebilir. C ve DC bitleri, çıkarımda sırasıyla
alıcı ve basamak alıcı dış biti olarak çalışmaktadır. Örnekler
için SUBLW ve SUBWF talimatlarına bakınız.
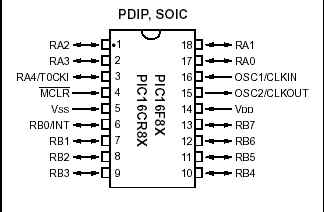
PIC16C84 için basitleştirilmiş bir blok diyagramı Şekil 3 – 1
dahilinde gösterilmiş ve ilgili pim tanımı Tablo 3 – 1 dahilinde
gösterilmiştir.
freguency
of OSC1,and denotes the instruction cycle
rate.
MCLR
4
4
I/P
ST
Master
clear(reset) input/programming voltage input.
This pin is
an active low reset to the device.
PORTA is a
bi -directional I/O port.
RAO
17
17
I/O
TTL
RA1
18
18
I/O
TTL
RA2
1
1
I/O
TTL
RA3
2
2
I/O
TTL
RA4/TOCKI
3
3
I/O
ST
Can also be
selected to be the clock input to the
TMR0 timer/counter.Output
is open drain type.
PORTB is a-bi directional I/O port.PORTB
can be
software
programmed for internal weak pull-up on all
inputs.
RBO/INT
6
6
I/O
TTL
RBO/INT can
also be selected as an external interrupt pin.
RB1
7
7
I/O
TTL
RB2
8
8
I/O
TTL
RB3
9
9
I/O
TTL
RB4
10
10
I/O
TTL
İnterrupt on change pin.
RB5
11
11
I/O
TTL
İnterrupt on change pin.
RB6
12
12
I/O
TTL/ST(2)
İnterrupt
on change pin.Serial programming clock.
RB7
13
13
I/O
TTL/ST(2)
İnterrupt
on change pin.Serial programming data.
Vss
5
5
P
*
Ground
reference for logic and I/O pins.
Vdd
14
14
P
*
Positive supply for logic and I/O pins.
Legend: I=input
O=output
I/O=input/output
P=power
* =not used
TTL=TTL input
ST= Schmitt
Trigger input
Note 1:This
buffer is a Schmitt Trigger input when configured in RC
oscillator mode and a CMOS input otherwise.
2:This buffer is a Schmitt
Trigger input when used in serial programming mode.
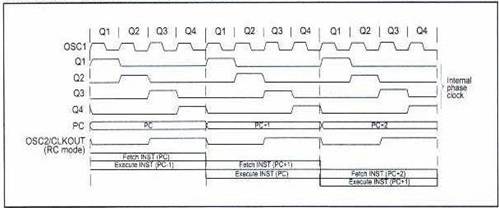
3.1 Zamanlayıcı Şeması / Talimat Döngüsü
(OSC1’den) Saat girdisi, Q1, Q2, Q3 ve Q4
olarak adlandırılan dört kısmen kaplamayan dördülleme saatlerini
oluşturmak amacıyla içten dörde bölünmüştür. Dahili olarak,
program sayacı (PC) her bir Q1’i artırmakta olup talimat program
hafızasından
alınıp Q4 dahilinde talimat kaydı içine kilitlemektedir. Q1’den
Q4’e doğru takip ederken talimat çözülüp gerçekleştirilmektedir.
Saatler ve talimat gerçekleştirme akışı Şekil 3 – 2 dahilinde
gösterilmiştir.
3.2 Talimat
Akışı / Boru Hattı
Bir “Talimat
Döngüsü” dört Q döngüsünden (Q1, Q2, Q3 ve Q4) oluşmaktadır.
Talimat alımı ve gerçekleştirilmesi, çözülüp gerçekleştirme diğer
bir talimat döngüsünü oluştururken, bir talimat döngüsünü
oluşturmaktadır. Yine de, boru hattı dolayısı ile, her bir talimat
etkin bir şekilde tek döngüde gerçekleştirmektedir. Eğer bir
talimat program sayacının değişmesine neden olursa, (ÖR: GOTO) bu
durumda talimatı tamamlamak için iki döngü gereklidir (Örnek 3 –
1).
Bir alım
döngüsü, Q1 dahilinde artan Program Sayacı (PC) ile başlamaktadır.
Gerçekleştirme
döngüsünde, alınan talimat, Q1 döngüsündeki “Talimat Kaydı” içine
kapatılmaktadır. Bu talimat daha sonra Q2, Q3 ve Q4 döngüleri
esnasında çözülür ve gerçekleştirilir. Veri hafızası Q2 esnasında
okunmakta olup (işlenen okuması) ve Q4 esnasında yazılır (amaç
yazılımı).
ŞEKİL 3-2:
CLOCK/INSTRUCTION CYCLE
3.0 YAPISAL GÖRÜNÜM
PIC16CXX ailesinin yüksek performansı, RISC mikroişlemcilerinde sıkça
bulunan bir dizi yapısal niteliğe atfedilebilir.
Başlangıç olarak, PIC16CXX bir Harvard Yapısı kullanmaktadır.
Bu yapı, ayrı hafızalardan kabul edilen program ve verilere sahiptir.
Bu yüzden gereç bir program hafıza taşıyıcısı ve bir veri hafıza taşıyıcısına sahiptir.
Bu, program ve verilerin aynı hafızadan edinildiği (aynı taşıyıcı üzerinden erişimler)
geleneksel von Neumann yapısı üzerinde bant genişliğini geliştirmektedir. Program
ve veri hafızasını ayırmak dahası 8 bit genişliğindeki veri dünyasından farklı olarak
boyutlandırılması için talimatlara izin vermektedir. PIC16CXX opkodları, tek kelime
talimatlarını mümkün kılan 14 bit genişliğindedir. Tam 14 bit genişliğinde program hafıza
taşıyıcısı tek bir döngü dahilinde bir 14 bitlik talimat sağlamaktadır.
İki kademeli bir boru hattı talimatların alınması ve gerçekleştirilmesini kısmen kaplamaktadır
(Örnek 3 - 1). Sonuç olarak, program dalları için hariç tüm talimatlar tek bir döngüde
gerçekleştirilmektedir (400 ns @ 10 MHz).PIC16C84, 1 K x 14 program hafızasına
hitap etmektedir. Tüm program hafızası içeridedir.PIC16CXX gereçleri, kayıt dosyaları veya
veri hafızasına doğrudan veya dolaylı olarak hitap etmektedir. Program sayacı dahil tüm
özel işlev kayıtları veri hafızası dahilinde haritalandırılmıştır. Bir ortogonal (simetrik) talimat,
herhangi hitap etme modunu kullanan herhangi bir kayıt hakkında herhangi bir işlemi
gerçekleştirmesini mümkün kılacak şekilde ayarlamaktadır. Bu simetrik yapı ve
"özel optimal durumlar"ın eksikliği, PIC16CXX ile programlamayı basit bir şekilde etkin hale
getirmektedir. Ek olarak, öğrenim eğrisi belirgin bir şekilde azaltılmıştır.PIC16C84, 36 x 8
SRAM ve 64 x 8 EEPROM veri hafızasına sahiptir.PIC16C XX gereçleri, bir 8 bitlik
ALU ve çalışan bir kaydedici içermektedir. ALU genel amaçlı bir aritmetik birimdir.
Çalışan bir kaydedici ve herhangi bir kayıt dosyasındaki veriler arasındaki aritmetik
ve Boolean işlevlerini gerçekleştirmektedir.ALU, 8 bit genişliğinde ve ekleme, çıkarma
değişim ve mantıksal işlem yeteneğidir. Aksi belirtilmediği sürece, aritmetik işlemler doğal
olarak ikinin bileşenleridir. İki işlenen talimatları dahilinde, tipik olarak bir işlenen çalışan
kaydedicisidir (W kaydedicisi), ve diğer işlenen bir dosya kaydedicisi veya bir anlık sabitidir.
Tek işlenen talimatlarında, işlenen ya W kaydedicisi veya bir dosya kaydedicisidir.
W kaydedicisi, ALU işlemleri için kullanılan 8 bitlik bir çalışan kaydedicisidir.
Yönlendirilmiş bir kayıt değildir.Gerçekleştirilen talimata bağlı olarak ALU, STATUS (Statü)
kaydında Taşıma (C), Basamak Taşıma (DC) ve Zero (Sıfır) (Z) bitlerinin değerlerini etkileyebilir.
C ve DC bitleri, çıkarımda sırasıyla alıcı ve basamak alıcı dış biti olarak çalışmaktadır.
Örnekler için SUBLW ve SUBWF talimatlarına bakınız.PIC16C84 için basitleştirilmiş bir blok
diyagramı Şekil 3 - 1 dahilinde gösterilmiş ve ilgili pim tanımı Tablo 3 - 1 dahilinde gösterilmiştir.
ŞEKİL 3-2: CLOCK/INSTRUCTION CYCLE
ÖRNEK 3-1: INSTRUCTION PIPELINE FLOW
1.MOVLW 55h
Fetch 1
Execute 1
2.MOVWF PORTB
Fetch 2
Execute 2
3.CALL SUB_1
Fetch 3
Execute 3
4. BSF
PORTA, BIT3
Fetch 4
Flush
Fetch SUB_1
Execute SUB_1
All instructions are single cycle,
except for any program branches.These take two cycles since
the fetch
instruction
is "flushed" from the pipeline while the new instruction is
being fetched and then executed.
4.0 HAFIZA ORGANİZASYONU
PIC16C84
dahilinde iki hafıza bloğu bulunmaktadır. Bunlar program hafızası
ve veri hafızasıdır. Her bir blok kendine ait taşıyıcıya sahip
olup bu sayede her bir bloğa erişim aynı salınım döngüsü esnasında
oluşabilir.
Veri hafızası
daha da genel amaçlı RAM ve Özel İşlev Kaydedicisi (SFR) olarak
bölünebilir. Çekirdeği kontrol eden SFR’nin çalışması burada
tanımlanmıştır. İkincil modülleri kontrol etmek için kullanılan
SFR’ler, her bir münferit ikincil modülün tartışıldığı bölümde
tanımlanmışlardır.
Veri hafıza
alanı aynı zamanda veri EEPROM hafızasını da içermektedir. Bu
hafıza doğrudan veri hafızasında haritalanmamış olmasına rağmen
dolaylı olarak haritalanmıştır. Okumak / yazmak için veri EEPROM
hafızasının adresini belirleyen dolaylı bir adres göstericisidir.
Veri EEPROM hafızasının 64 byte’ı 0h – 3Fh adres aralığına
sahiptir. EEPROM hafızası hakkında daha fazla detay Bölüm 7.0
dahilinde bulunabilir.
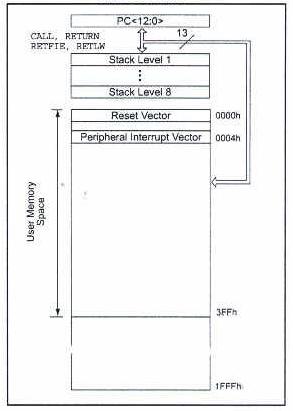
4.1 Program Hafızası Organizasyonu
PIC16CXX, 8K x
14 program hafıza boşluğunun hitap edilebileceği bir 13 bitlik
program sayacına sahiptir. PIC16C84 için, sadece ilk 1 K x 14
(0000h – 03FFh) fiziksel olarak geliştirilmişlerdir (Şekil 4 – 1).
Fiziksel olarak geliştirilmiş adres üzerinden bir konuma erişim
etrafına yapışmasına neden olacaktır. Örnek olarak konumlar 20h,
420h, 820h, C20h, 1020h, 1420h, 1820h ve 1C20h aynı talimat
olacaktır.
Sıfırlama
vektörü 0000h’da olup kesme vektörü 0004h’dadır.
ŞEKİL 4-1 :
PROGRAM MEMORY MAP AND STACK
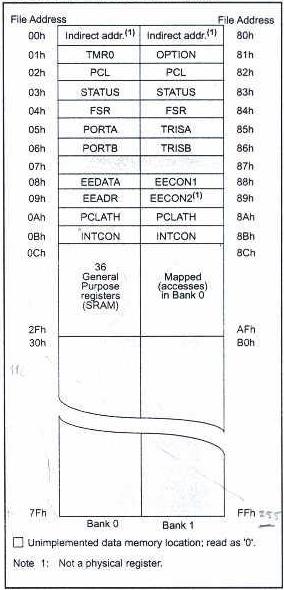
4.2 Veri Hafıza Organizasyonu
Veri hafızası
iki alana bölünmüştür. İlki Özel İşlev Kaydedicileri (SFR) alanı
olup ikincisi ise Genel Amaçlı Kaydediciler (GPR) alanıdır.
SFR’ler, gerecin işleyişini kontrol etmektedir.
Veri
hafızasının parçaları depolanmıştır. Bu, hem SFR alanı hem de GPR
alanı içindir. GPR alanı, genel amaçlı RAM’in 116 byte’dan
fazlasına izin vermek için depolanmıştır. SFR’nin depolanmış
alanları, ikincil işlevleri kontrol eden kayıtlar içindir.
Depolama, depo seçimi için kontrol bitlerinin kullanımını gerekli
kılmaktadır. Bu kontrol bitleri STATUS kaydında bulunmaktadırlar.
Şekil 4 – 2 veri hafıza harita organizasyonunu göstermektedir.
Talimatlar
MOVWF ve MOWF değerleri W kaydından kayıt dosyasındaki (“F”)
herhangi bir konuma hareket ettirebilirler, veya vesaire vesaire.
Tüm veri
hafızası, ya doğrudan her bir kayıt dosyasının kesin adresini
kullanarak veya dolaylı olarak Dosya Seçim Kaydı vasıtasıyla
erişilebilir (Bölüm 4.5). Dolaylı adresleme, veri hafızasının
depolanmış alanlarının içine erişim için RP1 : RP0 bitlerinin
mevcut değerini kullanmaktadır.
Veri hafızası,
genel amaçlı kaydediciler ve özel işlem kaydedicilerini kapsayan
iki depo dahilinde bölünmüştür. Depo 0, RP0 bitini temizleyerek
seçilmiştir (STATUS <5>). RP0 bit ayarı Depo 1’i seçmektedir. Her
bir Depo 7Fh (128 byte)’a kadar genişlemektedir. Her bir Deponun
ilk on iki konumu Özel İşlev Kaydedicileri için rezerve
edilmiştir. Geriye kalan, statik RAM gibi geliştirilmiş Genel
Amaçlı Kaydediciler’dir.
ŞEKİL 4-2:
REGISTER FILE MAP
4.2.1 GENEL AMAÇLI KAYIT DOSYASI
Tüm gereçler
aynı miktarda Genel Amaçlı Kayıt (GPR) alanına sahiptir. Her bir
GPR 8 bit genişliğinde olup FSR vasıtasıyla dolaylı veya doğrudan
erişilebilir (Bölüm 4.5).
Depo 1
dahilindeki GPR adresleri depo 0 dahilindeki adreslere
yönlendirilmiştir. Örnek olarak, adres konumu 0Ch veya 8Ch aynı
GPR’e erişecektir.
4.2.2 ÖZEL İŞLEV KAYDEDİCİLERİ
Özel İşlev
Kaydedicileri (Şekil 4 – 2 ve Tablo 4 – 1), gereç işlevini kontrol
etmek için CPU ve İkincil işlevler vasıtasıyla kullanılmışlardır.
Bu kaydediciler statik RAM’dir.
Özel işlev
kaydedicileri iki set dahilinde sınıflandırılabilir, çekirdek ve
ikincil. Çekirdek işlevleri ile birlikte çalışanlar bu bölüm
dahilinde tanımlanmıştır. İkincil niteliğin işlevleri ile ilgili
olanlar özel nitelik için olan bölüm dahilinde tanımlanmıştır.
TABLO 4-1:
REGISTER FILE SUMMARY
TABLO
4-1:
4.2.2.1 STATÜ KAYDI
STATUS kaydı,
veri hafızası için depo seçim biti ve RESET statüsü, ALU’nun
aritmetik statüsünü kapsamaktadır.
Herhangi bir
kayıtta olduğu gibi, STATUS kaydı herhangi bir talimat için varış
noktası olabilir. Eğer STATUS kaydı, Z, DC veya C bitlerini
etkileyen bir talimat için varış noktası ise, bu durumda bu üç
bite yazma engellenmiştir. Bu bitler, gereç mantığına bağlı olarak
ayarlanmış veya silinmiştir. Dahası TO ve PD bitleri yazılabilir
değildir. Bu yüzden, Varış Noktasında olduğu gibi STATUS kayıtlı
bir talimatın sonucu beklenenden farklı olabilir.
Örnek olarak,
CLRF STATUS üst üç biti temizleyecek ve Z bitini ayarlayacaktır.
Bu STATUS kaydını 000u u1uu olarak bırakmaktadır (u =
değişmemiştir).
Sadece BCF, BSF,
SWAPF ve MOVWF talimatları STATUS kaydını değiştirmek için
kullanılmalıdır, çünkü bu talimatlar herhangi bir statü bitini
etkilemez.
Not 1:
IRP ve RP1
bitleri (STATUS <7 . 6 >) PIC16C84 tarafından kullanılmamakta
olup temizlenmiş olarak programlanmalıdır. Gelecek ürünler ile
yukarı doğru uyumunu etkileyebileceğinden, genel amaçlı R / W
bitleri olarak bu bitlerin kullanımı tavsiye EDİLMEMEKTEDİR.
Not 2:
C ve DC
bitleri, çıkarımda sırasıyla alıcı ve basamak alıcısı biti
olarak çalışmaktadır. Örnekler için SUBLW ve SUBWF
talimatlarına bakınız.
Not 3:
STATUS
kaydı, Z, DC veya C bitlerini etkileyen bir talimat için varış
noktası olduğunda, bu üç bite yazılım engellenmiştir.
Belirtilen bit(ler) gereç mantığına göre güncellenecektir.